



見積もりを取得する




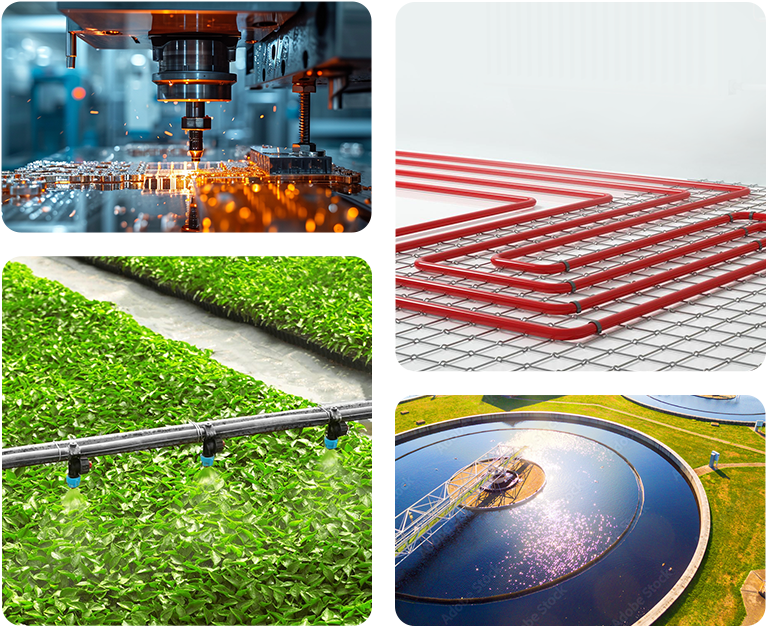


















あアプリケーション








T技術的なサポート
Alahot では標準に従うのではなく、標準を再定義します。
電力、電圧、統合、インテリジェンスの限界を押し上げることで、当社のバルブは 機械式アクチュエータをスマートでエネルギー効率の高いセンシング モジュールに組み込みます。

カスタマイズされたサービス

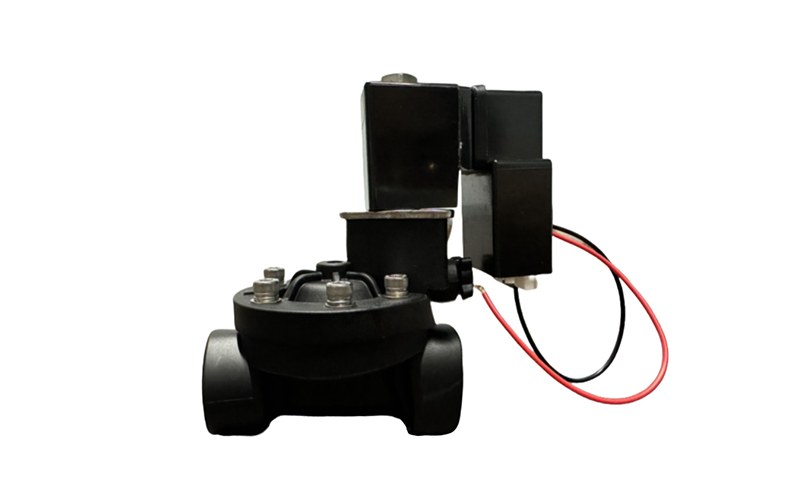
1 ワット未満の低電力
Alahot は、1 ワット未満で直動ソレノイド バルブを駆動することが知られている唯一のメーカーです。
バッテリー駆動、太陽光発電、その他の低電力システム用に、バルブを製造するためのチップを埋め込みました。 賢くて賢い。

低電流、3.3V 低電圧バルブ
他のブランドの2Aと比較して、Alahotのバルブはわずか0.002Aで動作します。
さらに良いことに、当社のバルブは 3.3V の電圧で動作できます。

カスタマイズされたサービス

0.05ワット ラッチング/パルステクニクス
アラホットラッチング/パルスバルブはバック信号の設定が不要で、少ない通貨でON/OFFが可能です。

グローバル制御スマートバルブ
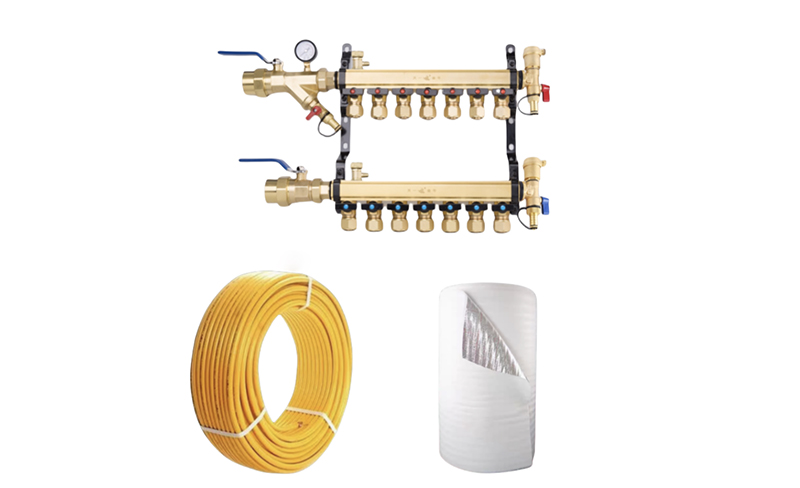
当社はセンサー (温度、流量、圧力) と完全な通信スタック (Wifi、Bluetooth、
NB-IoT)をバルブ本体内に内蔵。
追加のコントローラーは必要ありません。

見積もりを取得する
プラットフォームレベルのソフトウェアと制御
モバイルおよび Web コントロールにより、オン/オフ コマンド、パラメータ設定、ステータスを完全に制御できます モニタリング、およびマルチバルブ オーケストレーション。
完全な API とともに、Alibaba Cloud や AWS などのプラットフォームとの直接統合をサポートします。 アクセス 開発労力を最小限に抑えるため。
OEMサービス
ソフトウェアOEMを含むロゴパッケージOEMを受け入れます。
アラホトはソフトウェアエンジニアリングの優れた能力を持っています。
イノベーションは機能ではありません。システムがよりスマートになり、より安定し、より効率的になる方法です。
私たちは
中国の電磁弁メーカーと水電磁弁工場
.
この力をあなたの製品に統合しましょう。 Alahot に連絡して、コントロールの可能性を再定義しましょう。
Cカスタマイズプロセス
-
01ニーズの評価
エンジニアと 1~2日
1~2日 -
02ソリューション設計
&見積書 1~2日
1~2日 -
03サンプルの確認
&リビジョン 3~5日
3~5日 -
04契約書
署名と入金 1日
1日 -
05生産
モニタリングとQA 3~5日
3~5日 -
06配送・アフターサービス
&フォローアップ 販売後7日間/24時間
販売後7日間/24時間
W帽子のニュース



-
04
2026-01
-
25
2025-12
-
18
2025-12
-
26
2025-12
アラホトは 中国の水電磁弁メーカーと工場。最新のニュースや展示会については、ソーシャル メディアの投稿をフォローしてください。
発見する
お問い合わせ
-
 中国浙江省杭州市公墅区徳勝巷3/F
中国浙江省杭州市公墅区徳勝巷3/F -

-
 +86 18768178590
+86 18768178590
ニュースレター
著作権 © 2025 アラホト(浙江)テクノロジー株式会社
すべての著作権は留保されています。
OEM/ODM 電気ソレノイド バルブの製造
